展示全部
近红外DMD空间光调制器( 高损伤阈值NIR)
紫外高分辨率高速DMD空间光调制器(UV)
ViALUX计算成像用高速大数据吞吐量DMD空间光调制器
光纤耦合微透镜阵列
微透镜阵列/复眼透镜
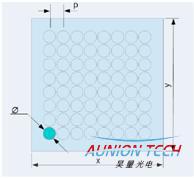
微透镜阵列焦距检测方法1,千分尺测量法西安工业大学通过透镜焦距和透镜镜面半径的理论关系,利用显微镜测量微透镜阵列子单元的直径并用千分尺测量矢高,从而完成焦距的测量,图 1-1所示。图1-1 平凸透镜焦距示意图对于一般的平凸型微透镜阵列,利用显微镜和千分尺分别测量子单元直径 Ф和矢高 h,计算其焦距为: (1-1)早期的微透镜阵列制造常采用熔融光刻胶法制作,形成的是平凸面形的透镜,利用该方法能完成相应的焦距测量。由于平凸透镜焦距受凸面曲率半径限制,使得该类型微透镜阵列的应用受到较大的局限。另外,该检测方法采用千分表接触是测量微透镜阵列的矢高,易造成微透镜表面的 ...
微透镜阵列和其实现的光束匀化简介微透镜阵列是由通光孔径及浮雕深度为微米级的透镜组成的阵列。它和传统透镜一样,最小功能单元也可以是球面镜、非球面镜、柱镜、棱镜等,同样能在微光学角度实现聚焦、成像,光束变换等功能,而且因为单元尺寸小、集成度高,使得它能构成许多新型的光学系统,完成传统光学元件无法完成的功能。微透镜阵列的结构从最小功能单元的排列方法可分为单排式、M*N排列、满布式等,同时可分为单面阵列和双面阵列。图1:微透镜阵列示意图微透镜阵列可分为折射型微透镜阵列与衍射型微透镜阵列两类:折射型微透镜(ROE)阵列:基于几何光学的折射原理,光在两种透明介质交界处(如空气和玻璃),将向折射率高的区域弯 ...
机前放置一个微透镜阵列组成。光束经过每个微透镜后都会聚焦在一点,聚焦点的位置被能够反应出光束的方向,然后反推出光的波前信息。下面的内容是模拟光束经过透镜后聚焦的过程,然后简单的叙述了两种相位恢复的算法。模拟步骤1. 构建相位面,获取焦面上的图像,计算斜率2. 重建波前方法分为两种,一种是区域法,一种是模型法。3. 对比重构之后的相位和输入的相位面,对比结果构建相位面,计算质心,获取斜率1、构建相位面数字化处理的方式多是无量纲的数据,因此默认量纲为a,假设为1um。一个连续的光斑,光强和相位面是连续的,这里将它离散,变成一个二维矩阵,单个像素的大小为a。相位面经过微透镜阵列后聚焦到CCD阵列所在 ...
果三维物体与微透镜阵列之间的距离较长,则获取的三维物体的图像质量会明显下降。尽管可以使用与光场相机的位置相对应的多个光线采样平面来解决这个问题,但是为了清晰地获取三维对象的三维信息,需要在改变深度的同时多次采集图像。换言之,使用光场技术无法一次清楚地获取深度较深的三维对象的三维信息。由于有效获取深度较深的三维信息需要花费大量时间,因此很难捕捉到人的运动等动态场景。这是实现基于电子全息的下一代三维电视系统面临的严峻问题。技术要点:基于此,日本千叶大学的Hidenari Yanagihara和Tomoyoshi Ito等人提出一种不采用光场技术的实时电子全息系统,成功重建了一个人在现实世界空间中移 ...
iers)或微透镜阵列,让左右眼接收不同的视角,从而产生立体视觉效果。但是这种技术需要观察者站在一个特定的位置,这限制了它的使用。当然,通过自动人眼追踪技术可以缓解对观察者位置的限制要求,但是这种技术还没有普及开来。3)运动视差(Motion Parallax)运动视差需要投影许多个视图,这样,即使观察者在显示器前移动也能够看到正确的视差(parallax)。不同视角的被投影密度需要确保能够产生正确的立体信息,因此,每个瞳孔间距至少需要两个视角。然而,为了实现从一个视角到另一个视角的平滑过渡,需要更大的视角密度。最佳视角密度取决于显示器的确切配置和预期的观察者距离,但数量大约为每度一个视角的量 ...
能的元件,如微透镜阵列功能,反射镜功能等。微透镜功能的记录和使用见图2。本文将全息光学元件作为反射镜使用,通过将同轴的准直平面波与同轴的曲率半径为60mm的球面波在16um厚的光致聚合物(photopolymer)薄膜上干涉形成(两束光的方向相反,从而生成反射模式全息图)。记录的全息图在639nm、532nm、457nm下多色复用记录(记录装置示意图见附录),用于彩色显示。实验结果:图3A为做成可穿戴式的AR显示器,图3B和C分别为室内和室外的实验结果。图3D为AR显示器各个模块与一个US quarter硬币的尺寸对比。附录:(1) 经典pancake光学器件的原理。见下图。a、显示器(Dis ...
的 LFM,微透镜阵列 (MLA) 放置在宽视场显微镜的原生像平面 (native image plane, NIP) 上,并且光学信号以欠采样方式记录在 MLA 后焦平面上。波动光学模型的发展,使得严重欠采样的高频空间信息可以通过对点扩散函数(PSF)求解卷积的方法得到一定程度的恢复,从而放宽空间和角度信息之间的权衡要求。当前不足:当前有两个主要因素限制了 LFM 的更广泛应用。首先,LFM 的空间信息的采样模式是不均匀的。特别是在NIP附近,信息的冗余导致重建时产生严重的伪影。其次,体积重建采用波动光学模型的 PSF 解卷积。传统 LFM 的 PSF 在横向和轴向维度上都有空间变化,因此用 ...
异可能是由于微透镜阵列相对于SPAD阵列的轻微错位或微透镜特性的局部变化造成的。表1总结了SS2的性能,并将其与其他最先进的大画幅科学相机进行了比较。SPAD相机由于其数字特性,理想的读出噪声为零,因此它们可以用单光子灵敏度执行广域FLIM。与MCPs和基于光电阴极的探测器相比,他们的CMOS技术是可扩展的,健壮的和经济的。在SPAD相机中,SS2采用了迄今为止最大的阵列尺寸,既能实现宽视场,又能实现高空间分辨率。表1 参数列表3.2 设备介绍SPAD5122是一个512×512像素的单光子雪崩二极管图像传感器。它可以使光子计数达到每秒10万帧,读出噪声为零。 Global shut可以实现纳 ...
(SLM)或微透镜阵列从一束激光产生多个激光焦点,这被认为是一种空间多路复用技术。多聚焦共聚焦拉曼光谱仪的重要组成部分是对来自多个激光聚焦的所有拉曼光谱的平行检测。使用微透镜阵列来产生多个激光聚焦。纤维束被用来从激光聚焦阵列中收集所有的拉曼信号,然后以线性堆叠的形式传输到光谱仪的入口狭缝。采用多通道电荷耦合器件(CCD)摄像机对所有的拉曼光谱进行了检测。使用一对扫描镜产生分时的多个激光聚焦,第三个振镜通过光谱仪的入口狭缝将每个聚焦的拉曼信号同步投射到多通道CCD相机上。每个光谱被放置在相机的不同像素行上,以避免附近光谱通道之间的重叠和串扰。多聚焦共聚焦拉曼光谱仪在分析吞吐量或成像速度上比传统的 ...
器之间插 入微透镜阵列来实现的。传感器获取复合信息,该复合信息允许识别检测到的光来自 的物点和透镜点。然而,由于结构(使用微透镜阵列)和基本(高斯极限)原因,图像分辨率与获 得的方向信息成反比地降低;因此,在基于简单强度测量的设备中,在衍射极限下的全光成像 被认为是无法实现的。图(a)传统全光成像(PI)设备的方案:物体的图像聚焦在微透镜阵列上,而每个微透镜将主透镜 的图像聚焦在后面的像素上。这种配置需要与方向分辨率的增益成比例的空间分辨率的损失;(b)显 示了相关全光成像(CPI)设置的方案,其中方向信息是通过将物体聚焦的传感器检索到的信号与收集 光源图像的传感器相关联而获得的。为了实现全光 ...
或 投递简历至: hr@auniontech.com